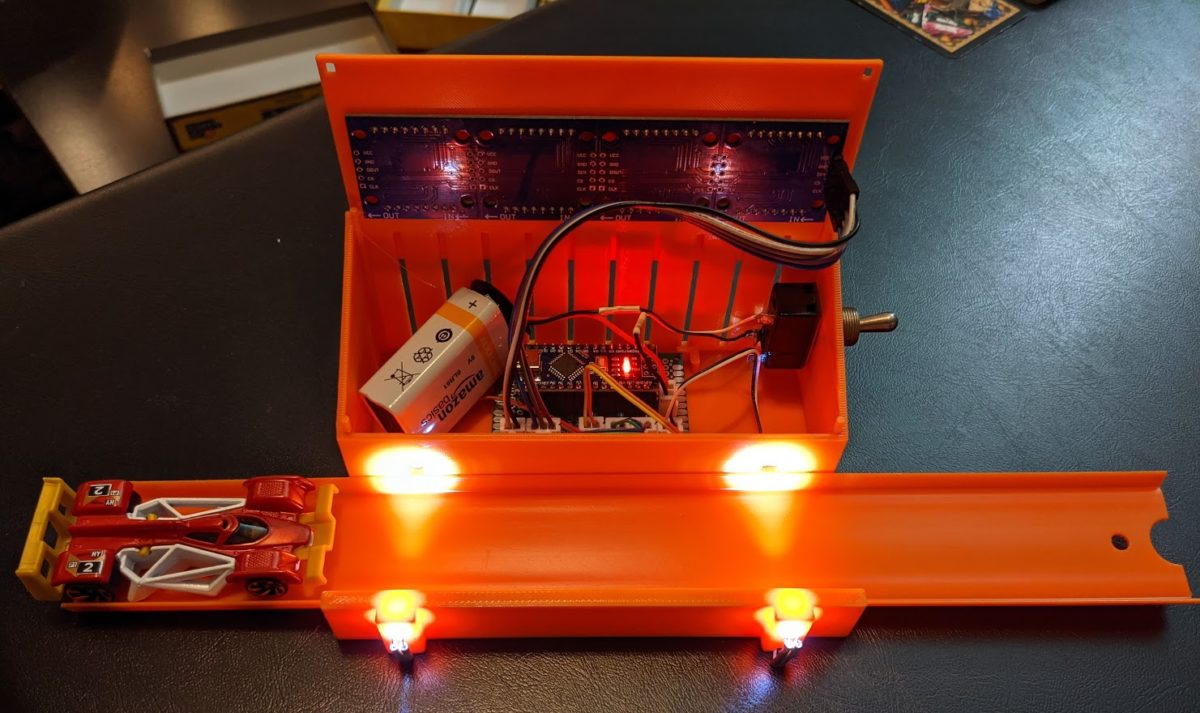
My nephew’s birthday was coming up in a couple days and I wanted to build or (3D) print him something. He loves Hot Wheels, so I thought I’d make him a speedometer with a digital speed readout. I envisioned two LEDs illuminating two photoresistors. When the car speeds by it would block one photoresistor and […]
Categories
DIY Hot Wheels speedometer